Robots · Controller Series
R-30iB Plus
Control R‑30iB Plus de FANUC mejora programación, precisión y facilidad de uso con iPendant e iHMI para automatización avanzada.



El robot colaborativo CRX-10iA/L es un robot industrial ideal para fabricantes con poca o ninguna experiencia en robótica, y se adapta a aplicaciones en numerosos sectores.
La CRX-10iA/L viene equipada con una capacidad de carga de 10 kg y un alcance de 1418 mm, lo que la convierte en la solución perfecta para aplicaciones industriales como la asistencia de máquinas, precogida y embalaje, dispensado y la soldadura. Su mayor alcance en comparación con la CRX-10iA y su exclusivo mecanismo de giro inferior le permiten realizar movimientos dinámicos de forma eficiente, incluso en espacios relativamente reducidos.
La serie de cobots CRX ofrece 8 años de garantía y cero mantenimiento, con la fiabilidad industrial comprobada que los clientes de FANUC esperan. Para aplicaciones de pintura y dosificación, este modelo también se ofrece como el cobot de pintura CRX-10iA/L
Explorar las características y beneficios clave
Explorar las características y beneficios clave
Explorar las características y beneficios clave
Explorar las características y beneficios clave
Explorar las características y beneficios clave
Control R‑30iB Plus de FANUC mejora programación, precisión y facilidad de uso con iPendant e iHMI para automatización avanzada.
FANUC collaborative robots deliver safe, high‑precision automation with flexible payloads and easy integration for any production environment.


Los robots y cobots de FANUC ofrecen una aplicación de adhesivo precisa y repetible para trabajos que van desde pequeñas tareas de encolado hasta el sellado de juntas a gran escala en la industria automotriz.

Los robots y cobots de FANUC ofrecen un proceso de selección y embalaje rápido y preciso, lo que reduce los desperdicios y la mano de obra, al tiempo que mejora la calidad, la velocidad y la eficiencia.

El ensamblaje robotizado aumenta la velocidad, la precisión y la flexibilidad en todos los sectores, con funciones inteligentes como iRVision y la detección de fuerza que mejoran la calidad.

Los robots FANUC ofrecen un acabado seguro y preciso —corte, lijado, pulido y más— con visión y detección de fuerza para mejorar la calidad, la velocidad y la productividad.

Los robots de paletizado y cobots de FANUC ofrecen una automatización rápida, precisa y segura para apilar cajas, bolsas, cubos o bidones, aumentando la eficiencia y el cuidado.

La soldadura robótica mejora la consistencia, la rentabilidad, el alcance, la repetibilidad y el ahorro de espacio. Explore nuestras soluciones de soldadura automatizada.

Fáciles de programar y reasignar a diferentes tareas, las soluciones y paquetes de cobots de FANUC incluyen herramientas y sistemas para la soldadura colaborativa por arco, TIG y MIG.

Los robots FANUC ayudan a las empresas de alimentación y bebidas a aumentar la productividad, mejorar la seguridad y mantener la competitividad con una automatización escalable.
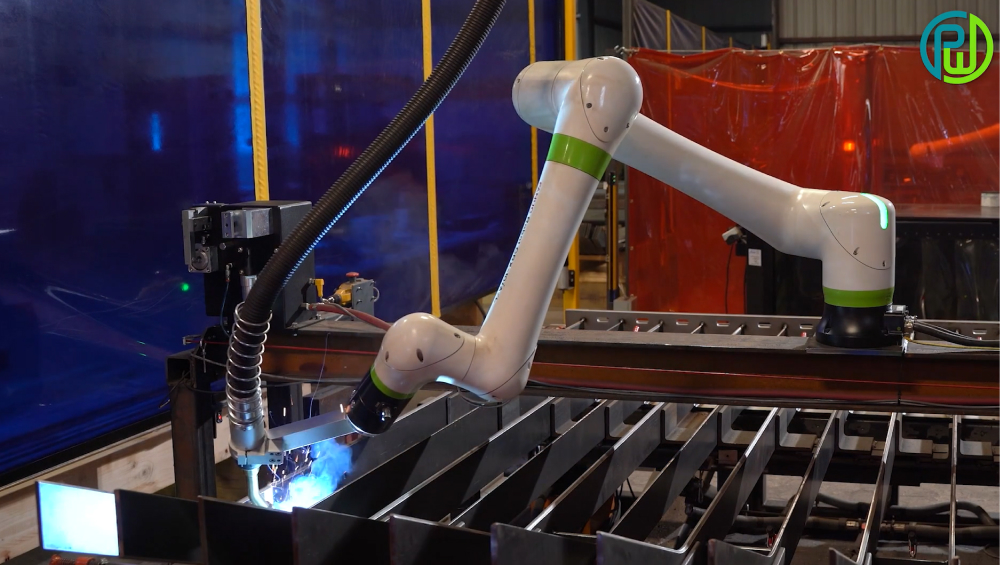
Una demostración de soldadura en vivo en la que un cobot FANUC CRX‑10iA/L realiza operaciones de soldadura por arco colaborativa.
Un robot colaborativo FANUC CRX‑10iA/L montado en un AGV realiza inspecciones autónomas de las palas de los aerogeneradores.
Los robots colaborativos e industriales de FANUC se encargan de la carga, la verificación de códigos de barras, el almacenamiento y la recuperación de alineadores ortodónticos personalizados dentro de un ASRS automatizado.
Un robot colaborativo utiliza visión 3D para identificar y recoger piezas orientadas aleatoriamente de un contenedor mediante una planificación inteligente del agarre.